More information
Main author
Walsh, D. G.
Co-Authors
Wood, D. P.; Alliot, R.; Glynn, C.; Simms, C. K.
Type of media
Publication type
Lecture
Publication year
2009
Publisher
18. EVU Conference, Hinckley
Citation
Walsh, D. G.:Motorcycle Capsize Mechanisms and Confidence Limits for Motorcycle Capsize Speeds from Slide/Bounce Distance. 18th EVU Conference, Hinckley (UK) 2009
English, 11 pages, 6 figures, 14 references
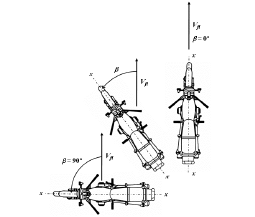
In many motorcycle accidents, the motorcycle capsizes and slides/bounces to rest following impact
with another vehicle/object, or following a loss of control. Traditional analysis only considers the
speed of the motorcycle after capsize has occurred and sliding/bouncing has commenced, neglecting
momentum loss during the capsize of the motorcycle and during the impact with the road surface.
The authors presented a new model of motorcycle capsize and slide/bounce, which accounts for the
loss of horizontal momentum resulting from the capsize and initial motorcycle-to-ground impact, and
the subsequent slide/bounce to rest in Part D of the Proceedings of the IMechE. The model includes
cases involving motorcycle capsize owing to loss of control as well as impact with another vehicle/
object. The model represents both the mean and variation present in the available experimental data
for dry roads very well and is used to develop confidence limits for incident reconstruction purposes,
in cases where only the motorcycle slide/bounce distance along the ground is known.
This paper reviews the model, and presents a further analysis of the motorcycle population, proposing
that different categories of motorcycle can be treated as separate populations. The motorcycle
population is divided into three categories, according to the build type. Previously proposed confidence
limit criteria are applied to predicting motorcycle speed ranges from slide distance, for the
different categories of motorcycle. It is also demonstrated that the level of prediction uncertainty
can be substantially reduced in cases where additional information specific to the vehicle and road
configurations is available.